
|
Продукция
Приводы шаговых двигателей Мотор-редукторы Шаговые двигатели Примеры использования  Контакты Контакты
 На главную На главную Новости СВ Альтера
|
Теория1. Шаговый двигатель Двигатель преобразует электрическую энергию в механическую. Шаговый двигатель преобразует электрические импульсы в направленные вращающие перемещения. Движения, которые создаются каждым импульсом, являются точными и повторяющимися, поэтому шаговые двигатели очень эффективны для позиционирования. Шаговые двигатели с постоянными магнитами состоят из ротора с постоянным магнитом, катушки и магнитопровода статора. Возбуждение обмотки создает направленное электромагнитное поле. Магнитное поле может изменятся путем последовательного ("пошагового") возбуждения обмоток статора, которые генерируют вращательное движение. На рисунке 1 показана типичная шаговая последовательность для двухфазного двигателя. На первом шаге только фаза А из двух фаз находится под напряжением. Ротор магнитно блокирован в показанном положении, так как противоположные полюса притягиваются. Когда отключается фаза А и включается фаза В, то ротор поворачивается по часовой стрелке на 90 градусов. На третьем шаге включается фаза А, но с противоположной полярностью в отличии от первого шага, что вызывает поворот еще на 90 градусов. На четвертом шаге фаза А выключается и включается фаза В с полярностью противоположной шагу 2. Повторяя эту последовательность ротор вращается с шагом в 90 градусов по часовой стрелке. Шаговая последовательность, показанная на рисунке 1, называется “однофазный шаг”. Более распространенный метод “двухфазного шага”, при котором обе фазы двигателя постоянно под напряжением. Однако, в каждый момент времени включается лишь полярность показанная на рисунке 2. С двухфазным шагом ротор фиксируется между “серединой” северного и “серединой” южного магнитных полюсов. Метод с постоянно включенными двумя фазами дает на 41,4% больше вращающий момент, чем метод, при котором включена одна фаза.  Рисунок 1 - Шаговая последовательность. Однофазное переключение.  Рисунок 1 - Шаговая последовательность. Двухфазное переключение. Половинный шаг Двигатель также может вращаться с половинным шагом путем вставки выключенного состояния при переходе между фазами. Таким образом, полный угол шага делится пополам. Например, двигатель с шагом 90 градусов будет двигаться с углом 45 градусов на каждой половине шага. См. рисунок 3.  Однако, половинный шаг дает потерю вращающего момента на 15-30% в зависимости от скорости по сравнению с двухфазным переключением. Так, одна из обмоток не питается на протяжении каждого меняющегося полушага, что приводит к уменьшению электромагнитной силы действующей на ротор, в результате чего происходит потеря момента. Шаговые системы использовались в промышленной автоматизации на протяжении многих лет для точного позиционирования станков, координатных столов, дозирующих автоматов и т.д. В отличие от типичных приводов переменного тока (используемых для управления скоростью), шаговые приводы и шаговые моторы используются в основном для управления положением. Типичная одноосевая шаговая система состоит из контроллера, шагового драйвера, шагового двигателя (с или без редуктора) и источника питания. Шаги обычно задаются двумя цифровыми входами: импульсным и битом направления. Один импульс на импульсном входе перемещает вал мотора на один шаг.
Принцип управления Нижеприведенный график показывает зависимости механических и электрических параметров двигателей постоянного тока.  На нем показаны скорость n, ток I, выходная мощность Р и КПД в зависимости от момента М для данного напряжения питания. Вращающий момент М является функцией тока I и константы k (выраженной в Нм/А). Двигатель развивает максимальный крутящий момент Мs при нулевой скорости (n=0), когда ток максимальный и определяется напряжением питания U и сопротивлением ротора R: Ms = Is × k С увеличением скорости вращения в якоре увеличивается противо-ЭДС Е, что ведет к снижению тока: Значение Е является произведением угловой скорости ω (выраженной в рад/с) и постоянной крутящего момента k (выраженной в В/рад/с=В×с=Нм×А): Таким образом, напряжение питания делится на две части: R × I – необходимое, чтобы установить ток в якоре, который создает крутящий момент М, и ω × k – для преодоления наводимого напряжения на скорости ω : Скорость холостого хода не является функцией напряжения питания и достигается тогда, когда Е становится почти равным U; ток холостого хода I0 является функцией от момента трения: Выходная мощность Р является произведением угловой скорости ω и крутящего момента М: Для заданного напряжения она достигнет своего максимума Рmax на половине статического момента Мs, где КПД близок к 50%. Максимальная длительная выходная мощность определяется гиперболой разделяющей непрерывный и прерывистый диапазон работ. Коэффициент полезного действия η – это соотношение механической мощности к электрической. Максимальный КПД ηmax достигается при относительно высокой скорости вращения. Его значение зависит от соотношения статического момента и момент трения и таким образом является функцией напряжения питания: Максимальный постоянный момент зависит от рассеиваемой мощности (I2R), его максимальное значение определяется выражением: Где Tmax - максимально допустимая температура якоря, Tamb - температура окружающей среды, Rmax - сопротивление ротора при температуре Tmax и Rth - полное термосопротивление (ротор - корпус - окружающая среда). При данном моменте М, увеличение или уменьшение питающего напряжения будет увеличивать или уменьшать скорость. Функция скорость-момент изменяется пропорционально питающему напряжению U.  Принцип работы бесщеточного двигателя постоянного тока Принцип управления Принцип работы такого мотора основан на том, что управляющий им контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был перпендикулярным вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки двигателя, и следовательно вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор двигателя. Знак угла между векторами определяет направление момента действующего на ротор. Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием датчика положения ротора (ДПР) происходит переключение обмоток и поток якоря поворачивается на следующий шаг. В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя. В двигательном режиме работы магнитно-движущая сила (МДС) статора опережает МДС ротора на угол 90°, который поддерживается с помощью датчика положения ротора. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР. Коммутация бесщеточных моторов В обычных коллекторных моторах коммутация производится механически с помощью токосъемника. В BLDC моторах коммутация производится в электронным способом. В этом случае необходимо знать мгновенное положение ротора для определения фазы для возбуждения. Угловое положение ротора может определяться: Использование датчиков Холла Обычно BLDC моторы имеют трехфазную обмотку. Самым простым способом является одновременная подача питания на две из них используя датчик Холла для определения положения ротора. Простая логика позволяет оптимально подавать питание на фазы, как функция положения ротора, так же как коллекторный узел в обычных ДПТ. Использование энкодера или резольвера Положение ротора может быть также определено с помощью энкодера или резольвера. Коммутация может быть организована очень просто, аналогично использованию датчиков Холла, или более сложно путем модуляции синусоидальных токов в трех фазах. Этот способ называется векторным управлением и его преимущество заключается в минимизации пульсации крутящего момента, а также высокого разрешения для точного позиционирования. Использование анализа противо-ЭДС Третий вариант не требующий датчика положения использует особенности электрических машин. Двигатели с таким управлением не требуют наличия датчиков или электронных компонентов, и поэтому нечувствительны к агрессивной среде. Это очень удобно для таких приложений, как ручные электроинструменты, где кабель питания постоянно перегибается и наличие всего трех проводов является преимуществом. Принцип работы бездатчикового мотора очень прост. Во всех двигателях, отношение противо-ЭДС и крутящего момента для противоположного положения ротора одинаково. Пересечение напряжения, индуцируемого в невозбужденной обмотке, с нулем соответствует положению с максимальным вращающим моментом генерируемым двумя другими запитанными фазами. Эта точка прохождения через ноль следовательно позволяет определить момент для следующей коммутации в зависимости от скорости мотора. Этот промежуток времени, на самом деле эквивалентен времени, которое требуется двигателю для перехода от позиции предыдущей комутации до позиции перехода противо-ЭДС нуля. Электронные устройства разработанные для этих функций коммутации позволяют легко управлять бездатчиковыми моторами. Схема силовой части вентильного двигателя: 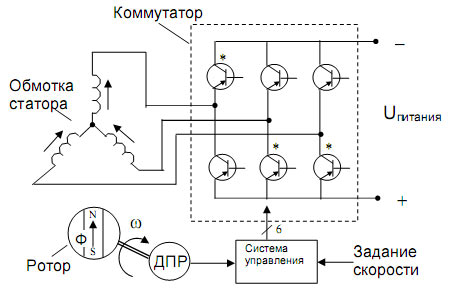 Зависимость скорости вращения вала вентильного двигателя от нагрузки:  где k1, k2 - константы, определяемые конкретным двигателем; R1, X1 - активное и реактивное сопростивление обмоток статора. При небольших скоростях вращения реактивное сопротивление намного меньше активного, то есть X1 << R1 и зависимость близка к линейной. С увеличением скорости, то есть частоты коммутации тока увеличивается реактивное сопростивление обмоток статора, и характеристика вентильного двигателя становится более чувствительна к перепадам нагрузки. Зависимости скорости вращения от напряжения питания преобразователя для управления вентильным двигателем имеют вид: 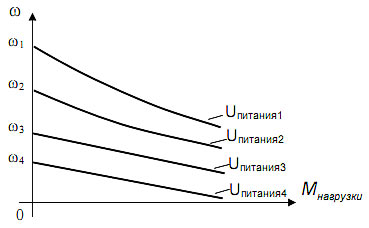 Так, например, для преобразователя BLD-07-INTB2 итальянского производителя Intecno в технических характеристиках указаны пределы рабочего напряжения 20 - 36В постоянного тока. Важно понимать, что величина подводимого напряжения будет влиять на максимальную скорость вращения вентильного электродвигателя. Вследствие особенностей характеристик вентильного двигателя их можно использовать для механизмов, работающих на низких скоростях с высокой точностью.

Соединения Униполярное и Биполярное половина обмотки, из-за использования меньшего количества витков, не дает нам высокий крутящий момент на низких оборотах, но благодаря низкой индуктивности поддерживает момент до высоких скоростей. Биполярное последовательное соединение использует всю обмотку, это дает высокий крутящий момент на низких скоростях. Но из-за высокой индуктивности момент момент быстро спадает с увеличением скорости. Биполярное паралельное соединение также использует полную обмотку, что дает хорошие низкоскоростные характеристики. И низкая индуктивность такого соединения позволяет удерживать момент до высоких скоростей. Но помните, что необходимо увеличить ток на 40% для получения таких характеристик. Диаграмма соединения обмоток |